在上一章,我们差不多讨论了卷积神经网络所有的主要内容,和卷积神经网络有关的重点和难点,也都差不多集中在上一章。这一章,我们讨论几个经典的卷积神经网络,它们都是学界和业界的成功实践。它们是:
AlexNet
VGG
GoogLeNet
ResNet
DenseNet
接下来,我们分别讨论。
AlexNet
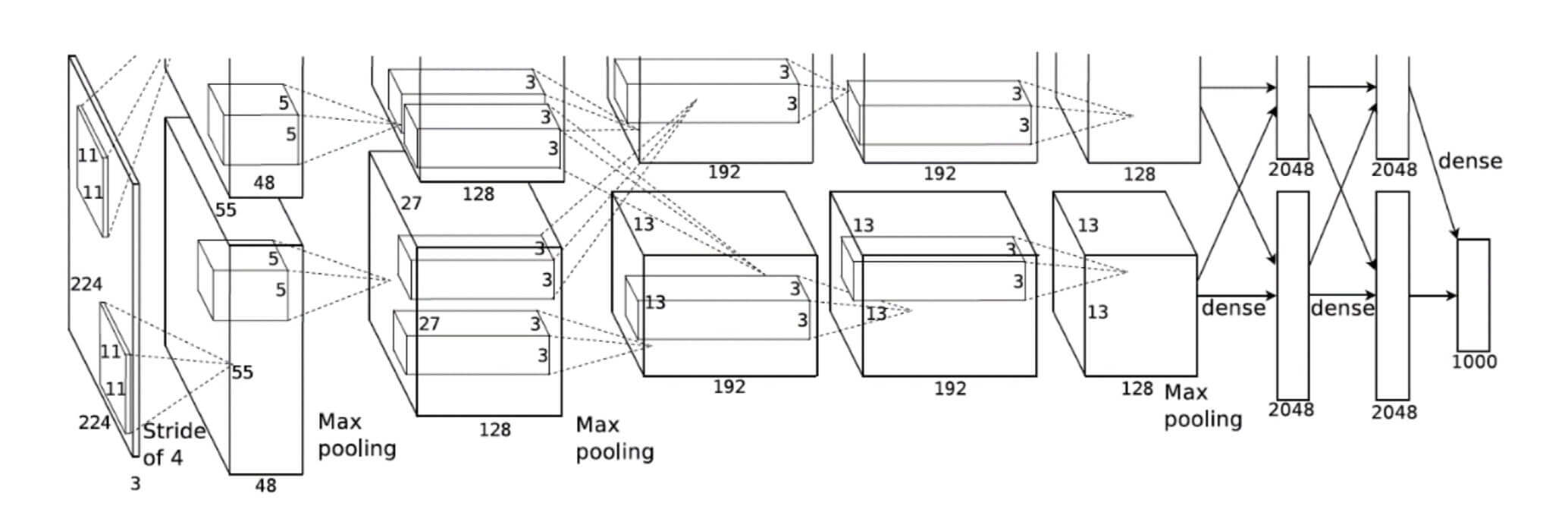
2012年,Alex Krizhevsky获得了ILSVRC12挑战赛的冠军,而他所采用的方案就是由他本人提出的AlexNet神经网络。
AlexNet所接收的输入是224*224*3的彩色图片,经过5个卷积层和3个全连接层后,输出当前图片分别属于1000个类别的概率分布。为了降低特征图的维度,AlexNet在第1、2、5个卷积层后添加了Max Pooling层。
AlexNet的创新之处在于:
层数达到了较深的8层,而在之前的ILSVRC10、ILSVRC11中只有4层的深度。
采用了ReLU激活函数,过去的神经网络大多采用Sigmoid激活函数。
引入Dropout层。
Dropout提高模型的泛化能力,避免过拟合。
VGG
VGG介绍
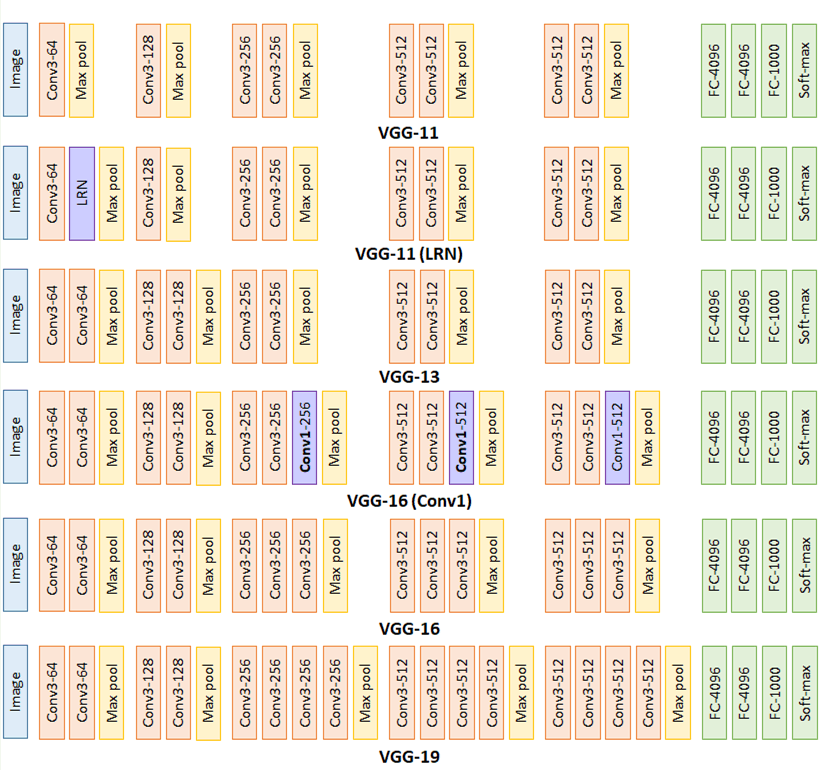
2014年,牛津大学VGG实验室获得了ILSVRC14挑战赛的亚军,而他们所采用的就是VGG11、VGG13、VGG16、VGG19等VGG系列的深度神经网络模型。
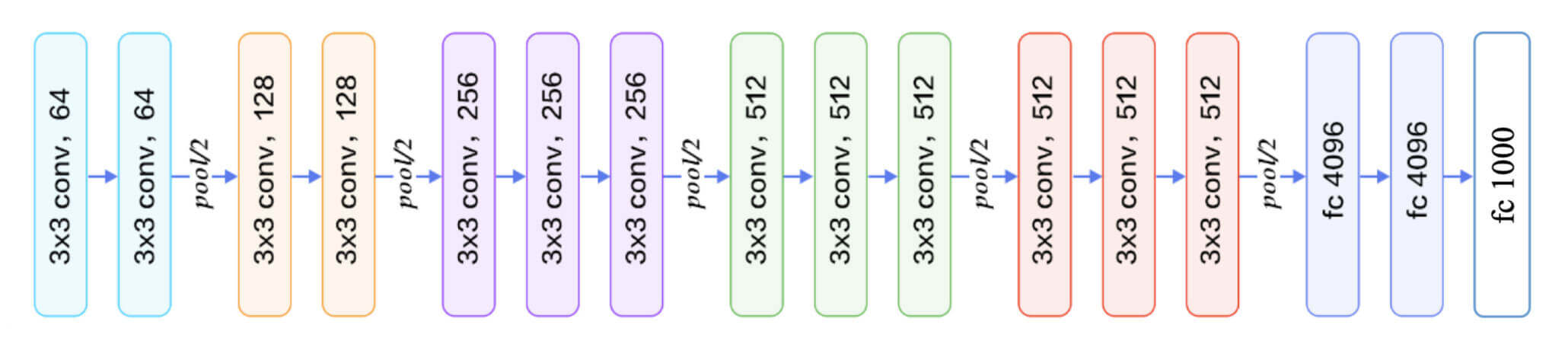
我们以VGG16为例。所接收的输入是224*224*3的彩色图片,经过2个Conv-Conv-Pooling单元和3个Conv-Conv-Conv-Pooling单元的堆叠,最后通过3层全连接层输出当前图片分别属于1000类别的概率分布。
下图是整个VGG系列的网络结构比较:
VGG系列网络的创新之处在于:
层数最深提升至19层。
全部采用更小的3*3卷积核,拥有更少的参数量。
采用更小的池化层2*2窗口和步长s = 2 s=2 s = 2
总之一句话,“层数更深,每一层更小”。
VGG实现
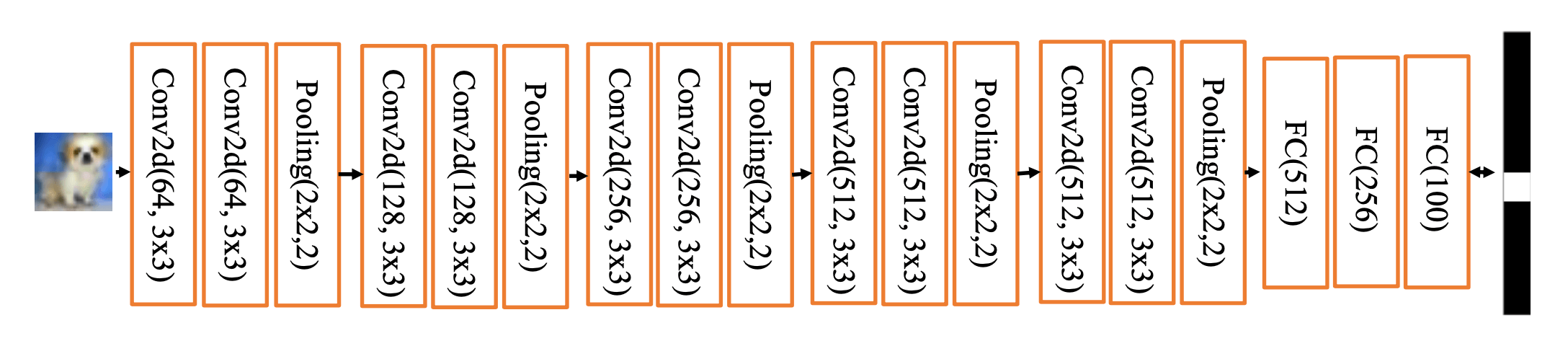
我们以CIFAR100数据集为例,即把图片分为100个类别。因此我们需要对标准的VGG13进行简单的修改。
把输入[224*224*3]改为[32*32*3]。
把三个全连接层从[4096,4096,1000]改成[512,256,100]。
并且,我们试图把这个网络拆开成两个网络,分别是:
卷积池化网络
全连接网络
卷积池化网络:
我们根据网络结构图,构建卷积层和池化层。并试图随机输入一个[32*32*3]的数据,观察输出。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 import tensorflow as tffrom tensorflow.keras import layers,Sequentialconv_pool_layers = [ layers.Conv2D(filters=64 ,kernel_size=[3 ,3 ],padding='same' ,activation=tf.nn.relu), layers.Conv2D(filters=64 ,kernel_size=[3 ,3 ],padding='same' ,activation=tf.nn.relu), layers.MaxPooling2D(pool_size=[2 ,2 ],strides=2 ,padding='same' ), layers.Conv2D(filters=128 ,kernel_size=[3 ,3 ],padding='same' ,activation=tf.nn.relu), layers.Conv2D(filters=128 ,kernel_size=[3 ,3 ],padding='same' ,activation=tf.nn.relu), layers.MaxPooling2D(pool_size=[2 ,2 ],strides=2 ,padding='same' ), layers.Conv2D(filters=256 ,kernel_size=[3 ,3 ],padding='same' ,activation=tf.nn.relu), layers.Conv2D(filters=256 ,kernel_size=[3 ,3 ],padding='same' ,activation=tf.nn.relu), layers.MaxPooling2D(pool_size=[2 ,2 ],strides=2 ,padding='same' ), layers.Conv2D(filters=512 ,kernel_size=[3 ,3 ],padding='same' ,activation=tf.nn.relu), layers.Conv2D(filters=512 ,kernel_size=[3 ,3 ],padding='same' ,activation=tf.nn.relu), layers.MaxPooling2D(pool_size=[2 ,2 ],strides=2 ,padding='same' ), layers.Conv2D(filters=512 ,kernel_size=[3 ,3 ],padding='same' ,activation=tf.nn.relu), layers.Conv2D(filters=512 ,kernel_size=[3 ,3 ],padding='same' ,activation=tf.nn.relu), layers.MaxPooling2D(pool_size=[2 ,2 ],strides=2 ,padding='same' ), ] conv_pool_net = Sequential(conv_pool_layers) conv_pool_net.build(input_shape=[None ,32 ,32 ,3 ]) x = tf.random.normal(shape=[1 ,32 ,32 ,3 ]) print(conv_pool_net(x).shape)
运行结果:
即,一个[32*32*3]的图片数据,经过卷积层和池化层的层层操作后,转变为了[1*1*512]的数据。
全连接网络
正如之前讨论,我们把三个全连接层从[4096,4096,1000]改成[512,256,100]。
1 2 3 4 5 6 7 fc_layers = [ layers.Dense(units=512 ,activation=tf.nn.relu), layers.Dense(units=256 ,activation=tf.nn.relu), layers.Dense(units=100 ) ] fc_net = Sequential(fc_layers) fc_net.build(input_shape=[None ,512 ])
处理数据
接下来,我们加载数据,并对数据进行简单的处理。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 from tensorflow.keras import datasetsdef preprocess (x,y) : """ :param x: :param y: :return: """ x = tf.cast(x,dtype=tf.float32) / 255.0 y = tf.cast(y,dtype=tf.int32) return x,y (x_train, y_train), (x_test, y_test) = datasets.cifar100.load_data() y_train = tf.squeeze(y_train,axis=1 ) y_test = tf.squeeze(y_test,axis=1 ) print(x_train.shape,y_train.shape,x_test.shape,y_test.shape) db_train = tf.data.Dataset.from_tensor_slices((x_train, y_train)) db_train = db_train.shuffle(buffer_size=1000 ).map(preprocess).batch(200 ) db_test = tf.data.Dataset.from_tensor_slices((x_test, y_test)) db_test = db_test.map(preprocess).batch(200 ) sample = next(iter(db_train)) print(sample[0 ].shape) print(sample[1 ].shape)
运行结果:
1 2 3 (50000, 32, 32, 3) (50000,) (10000, 32, 32, 3) (10000,) (200, 32, 32, 3) (200,)
训练网络
这里的训练网络和我们之前的有所不一样,我们把VGG拆分成了两个网络,所以这里我们同时需要训练两个网络。
两个网络共用一个损失函数。
损失函数对两个网络的参数求解梯度。
同时优化两个网络的参数。
示例代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 from tensorflow.keras import optimizersoptimizer = optimizers.Adam(learning_rate=0.0001 ) variables = conv_pool_net.trainable_variables + fc_net.trainable_variables epochs = 1 for epoch in range(epochs): for step,(x,y) in enumerate(db_train): with tf.GradientTape() as tape: out = conv_pool_net(x) out = tf.reshape(out,[-1 ,512 ]) logits = fc_net(out) y_onehot = tf.one_hot(y,depth=100 ) loss = tf.losses.categorical_crossentropy(y_onehot,logits,from_logits=True ) loss = tf.reduce_mean(loss) grads = tape.gradient(loss,variables) optimizer.apply_gradients(zip(grads,variables)) if step%10 == 0 : print(epoch,step,'loss: ' ,loss.numpy())
运行结果:
1 2 3 4 5 6 7 8 9 0 0 loss: 4.605081 0 10 loss: 4.6054974 0 20 loss: 4.6071663 【部分运行结果略】 0 220 loss: 4.1778083 0 230 loss: 4.0723414 0 240 loss: 4.2223144
测试网络
我们再用测试集,测试我们的神经网络。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 otal_num = 0 total_correct = 0 for x,y in db_test: out = conv_pool_net(x) out = tf.reshape(out,[-1 ,512 ]) logits = fc_net(out) prob = tf.nn.softmax(logits,axis=1 ) pred = tf.argmax(prob,axis=1 ) pred = tf.cast(pred,tf.int32) correct = tf.cast(tf.equal(pred,y),dtype=tf.int32) correct = tf.reduce_sum(correct) total_num = total_num + x.shape[0 ] total_correct = total_correct + correct.numpy() acc = total_correct / total_num print(acc)
运行结果:
因为我们只训练了一个epoch,所以效果有限。但是我们看到准确率是0.0537,是高于0.01的。说明是有一定的效果的。
GoogLeNet
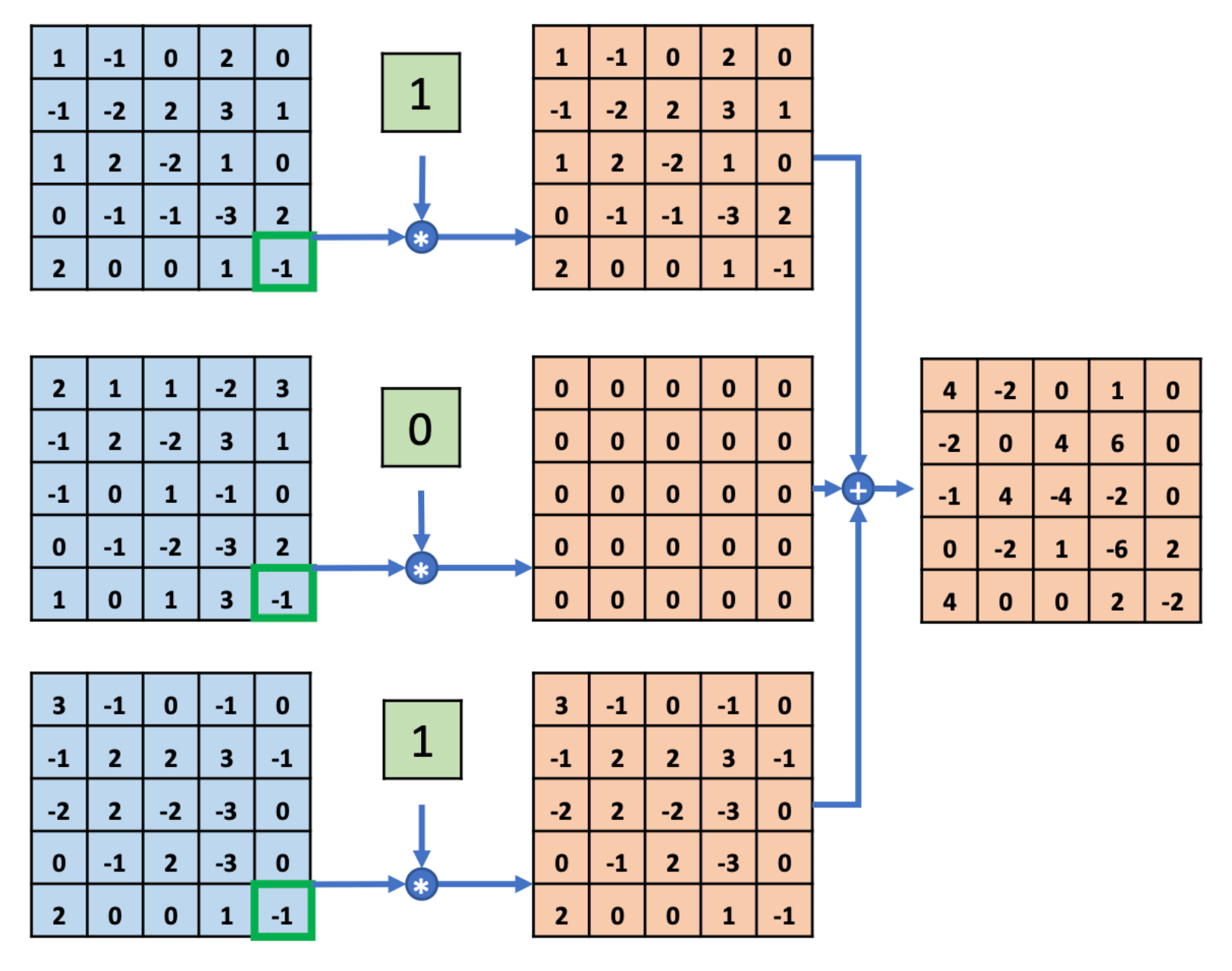
刚刚我们提到了,2014年,ILSVRC14挑战赛的亚军是VGG,那么冠军是谁呢?GoogLeNet。1*1,这种卷积核的特别之处在于,不改变特征图的宽高,只对通道数进行变换。
如图,是1*1卷积核的计算过程,我们这里不赘述。
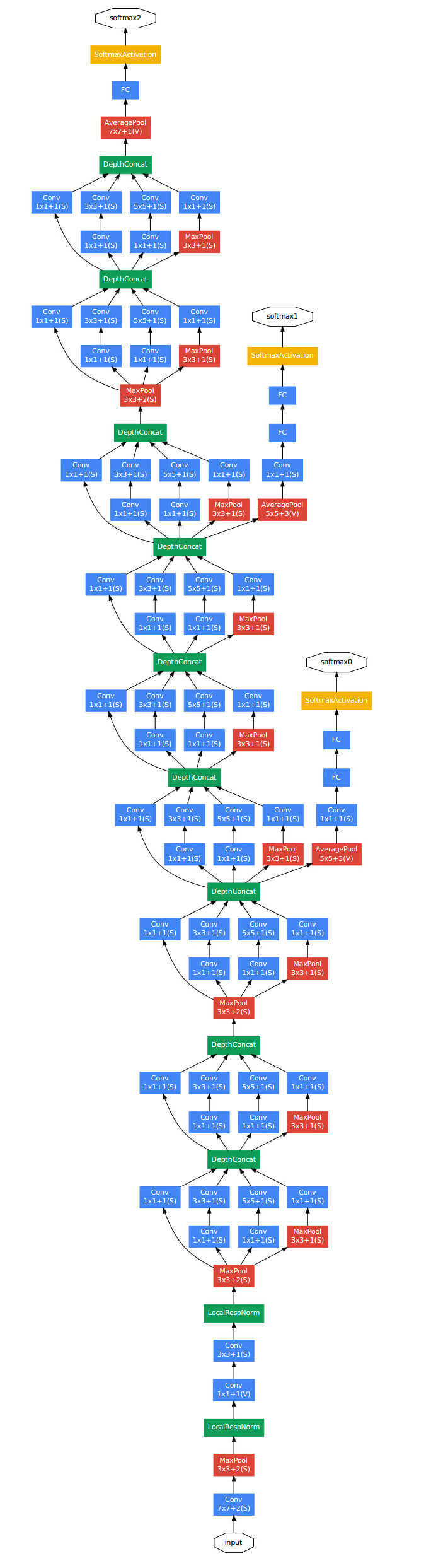
而且GoogLeNet比VGG深,GoogLeNet一共22层。
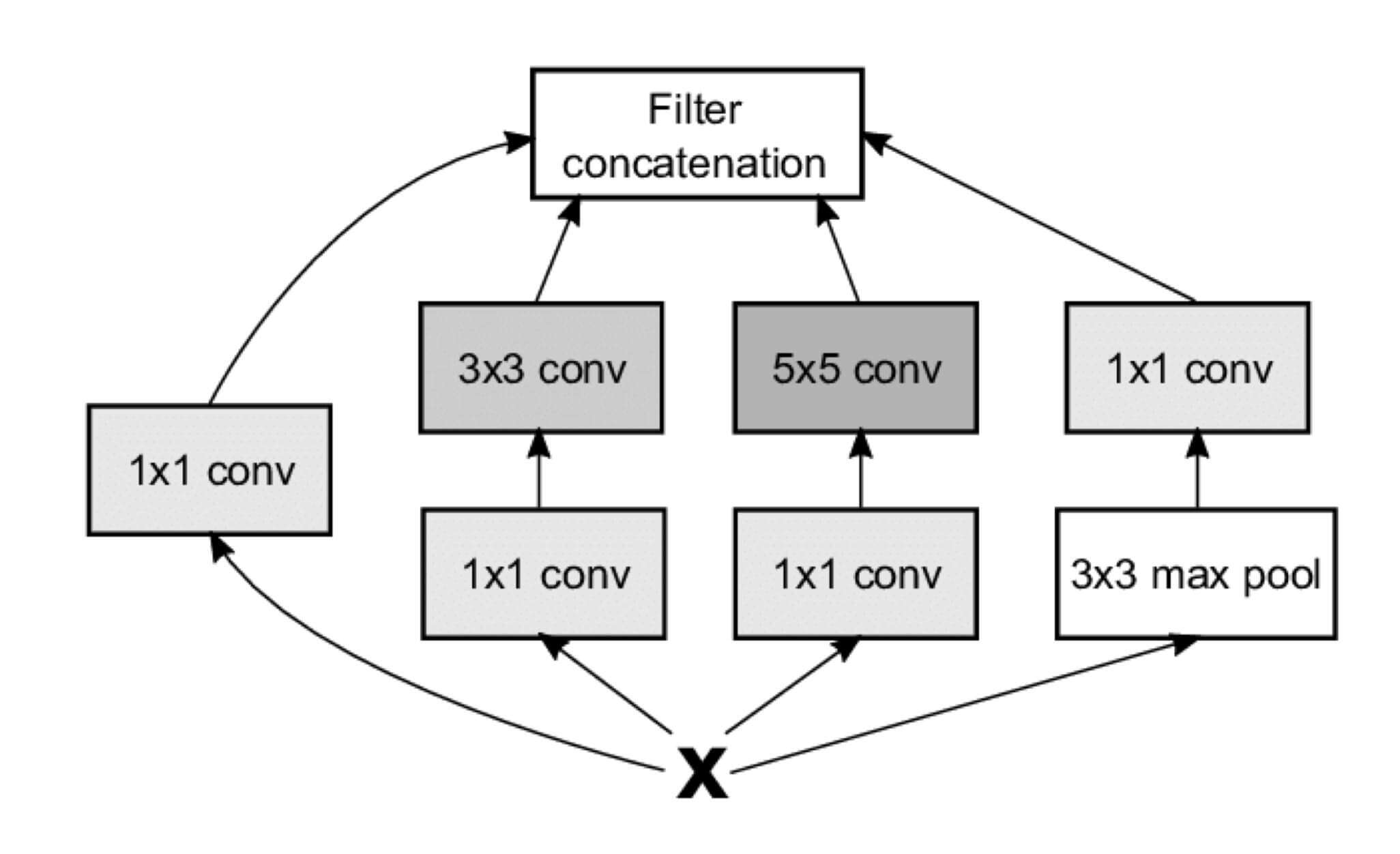
VGG是两个卷积加一个池化组成了一个模块,GoogLeNet同样有模块设计,而且其模型被命名为Inception。
Inception的结构如图所示:
1*1卷积层1*1卷积层 + 3*3卷积层1*1卷积层 + 5*5卷积层3*3最大池化层 + 1*1卷积层
最后四个子网络的输出,会通过Filter concatenation进行合并。
那么Filter concatenation是如何合并的呢?1,padding都是'same'。所以最后的四个子网络的输出和一开始的输入,h相同,w也相同。
1 concatenated_tensor = tf.concat(3, [branch1, branch2, branch3, branch4])
即,如果存在4个[10*10*3]的数据,会按照深度拼接成[10*10*12]的数据。
Inception这个单词,还有一个意思:盗梦空间。
刚刚我们讨论了Inception的结构,而GoogLeNet的网络结构如下:
我们注意到,这个网络还有一个有意思的地方,中途露出了两个小尾巴,那是两个辅助分类器。这就是GoogLeNet的精妙之处了,除了最终的分类结果外,中间节点的分类效果还是不错的,所以GoogLeNet干脆从中间拉了两条分类器出来,然他们按一个较小的权重(如0.3)加到最终的分类结果中。这样做好处有:
相当于做了模型整合
给网络增加了反向传播的梯度信号,一定程度解决了深网络带来的梯度消失的问题
关于更高清的GoogLeNet网络结构,大家可以参考这篇论文的第七页。https://arxiv.org/pdf/1409.4842.pdf
一般写作GoogLeNet,而不是GoogleNet,GoogLeNet的作者说是为了向LeNet致敬。
ResNet
刚刚提到Inception还有一个意思:盗梦空间。而这部电影,有一句很著名的台词,现在常被用来调侃深度学习。
的确,深度学习的一个发展趋势是越来越深。毕竟,网络的层数越深,越有可能获得更好的泛化能力。但是当模型越深,网络变得越来越难训练。越容易出现梯度弥散和梯度爆炸的现象。
那么?怎么解决这个问题呢?
那就让网络别那么深,可是网络不深呢,泛化能力又不好。想泛化能力好,网络就得深。
我们给深层神经网络添加一种回退到浅层神经网络的机制。
2015年,微软亚洲研究院何凯明等人发表了基于Skip Connection的深度残差网络(Residual Neural Network,简称ResNet)。
BasicBlock
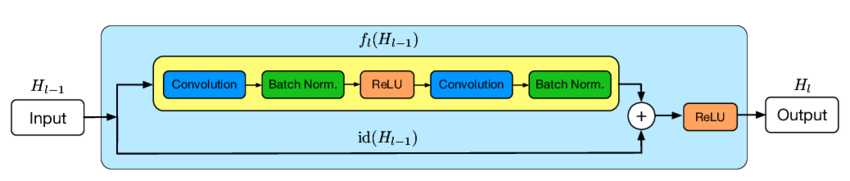
在讨论ResNet之前,我们先讨论一下BasicBlock。如图,就是一个BasicBlock。为我们在卷积层的输入和输出之间添加Skip Connection实现层数回退机制。
H ( x ) = x + F ( x ) \bold{H}(x) = x + \bold{F}(x) H ( x ) = x + F ( x ) x x x F ( x ) \bold{F}(x) F ( x ) Skip Connection中添加额外的卷积运算,比如i d e n t i t y ( x ) identity(x) i d e n t i t y ( x ) i d e n t i t y ( x ) identity(x) i d e n t i t y ( x ) 1*1的卷积运算居多,主要用于调整输入的通道数。
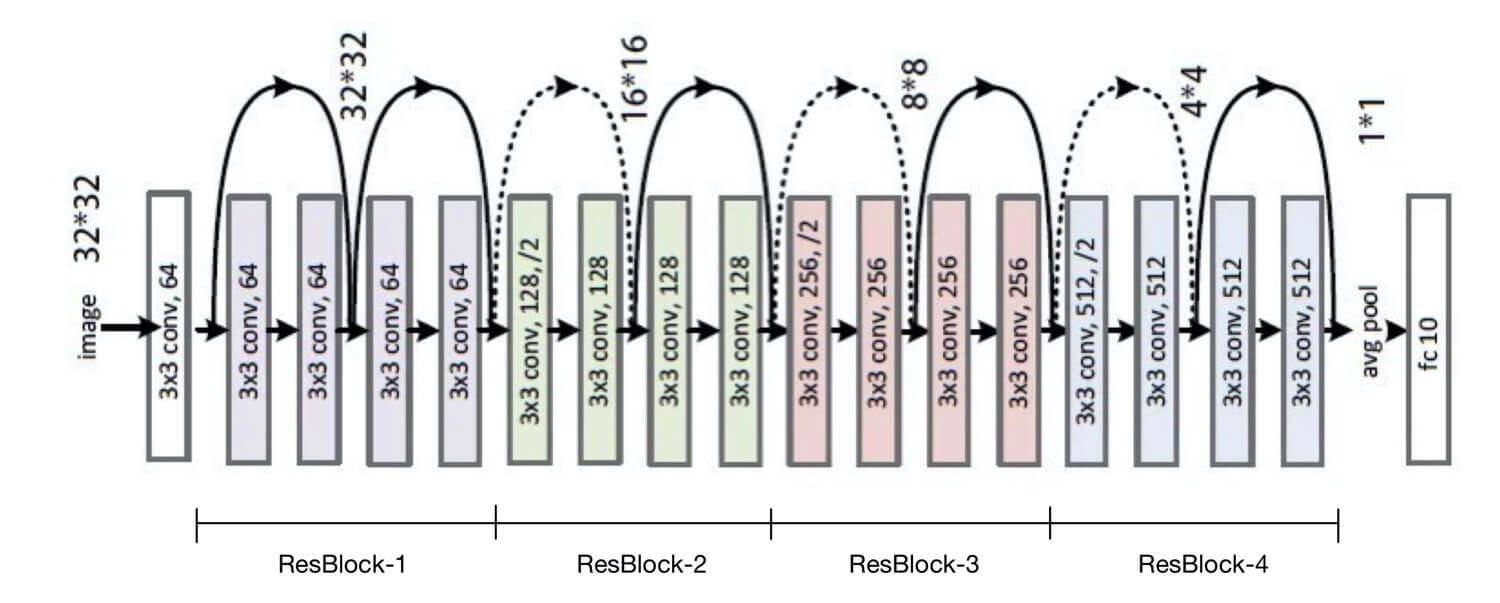
ResNet
讨论了BasicBlock,我们再来讨论一下ResBlock。ResBlock由一个或多个BasicBlock堆叠而成,一个或多个ResBlock堆叠成ResNet。
ResNet的实现
现在,我们试图实现一个ResNet,通过我们以CIFAR100数据集为例。
BasicBlock
我们从BasicBlock开始。先实现BasicBlock图片的上半部分:F ( x ) \bold{F}(x) F ( x )
BasicBlock继承layers.Layer。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 class BasicBlock (layers.Layer) : def __init__ (self, filter_num, strides=1 ) : """ :param filter_num: 卷积核的数量 :param strides: 步长,默认为1 """ super(BasicBlock, self).__init__() self.conv1 = layers.Conv2D(filters=filter_num, kernel_size=(3 , 3 ), strides=strides, padding='same' ) self.bn1 = layers.BatchNormalization() self.relu = layers.Activation('relu' ) self.conv2 = layers.Conv2D(filters=filter_num, kernel_size=(3 , 3 ), strides=1 , padding='same' ) self.bn2 = layers.BatchNormalization()
正如之前讨论,x x x F ( x ) \bold{F}(x) F ( x ) i d e n t i t y ( x ) identity(x) i d e n t i t y ( x )
1 2 3 4 5 6 7 if strides != 1 : self.identity = Sequential() self.identity.add(layers.Conv2D(filters=filter_num, kernel_size=(1 , 1 ), strides=strides)) else : self.identity = lambda x: x
最后,我们实现前向运算部分。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 def call (self, inputs, training=None) : """ :param inputs: :param training: :return: """ out = self.conv1(inputs) out = self.bn1(out, training=training) out = self.relu(out) out = self.conv2(out) out = self.bn2(out, training=training) idVal = self.identity(inputs) output = layers.add([out, idVal]) output = tf.nn.relu(output) return output
ResBlock
ResBlock由一个或多个BasicBlock组成。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 def build_resblock (self,filter_num,blocks,strides=1 ) : """ :param filter_num: :param blocks: :param strides: :return: """ res_blocks = Sequential() res_blocks.add(BasicBlock(filter_num=filter_num,strides=strides)) for _ in range(blocks): res_blocks.add(BasicBlock(filter_num=filter_num,strides=1 )) return res_blocks
ResNet
ResNet由一个或多个ResBlock组成。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 def __init__ (self,layer_dims,num_class=100 ) : """ :param layer_dims: """ super(ResNet,self).__init__() self.stem = Sequential([layers.Conv2D(filters=64 ,kernel_size=(3 ,3 ),strides=(1 ,1 )), layers.BatchNormalization(), layers.Activation('relu' ), layers.MaxPool2D(pool_size=(2 ,2 ),strides=(1 ,1 ),padding='same' )]) self.layer1 = self.build_resblock(filter_num=64 ,blocks=layer_dims[0 ]) self.layer2 = self.build_resblock(filter_num=128 ,blocks=layer_dims[0 ],strides=2 ) self.layer3 = self.build_resblock(filter_num=256 ,blocks=layer_dims[0 ],strides=2 ) self.layer4 = self.build_resblock(filter_num=512 ,blocks=layer_dims[0 ],strides=2 ) self.avgpool = layers.GlobalAveragePooling2D() self.fc = layers.Dense(units=num_class)
ResNet的前向运算
示例代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 def call (self, inputs, training=None) : """ :param inputs: :param training: :param mask: :return: """ x = self.stem(inputs,training=training) x = self.layer1(x,training=training) x = self.layer2(x,training=training) x = self.layer3(x,training=training) x = self.layer4(x,training=training) x = self.avgpool(x) x = self.fc(x) return x
实例化一个ResNet13
示例代码:
1 2 3 model = ResNet(layer_dims=[2 ,2 ,2 ,2 ]) model.build(input_shape=(None , 32 , 32 , 3 )) model.summary()
运行结果:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 Model: "res_net" _________________________________________________________________ Layer (type) Output Shape Param # ================================================================= sequential (Sequential) (None, 30, 30, 64) 2048 _________________________________________________________________ sequential_1 (Sequential) (None, 30, 30, 64) 223104 _________________________________________________________________ sequential_2 (Sequential) (None, 15, 15, 128) 823168 _________________________________________________________________ sequential_4 (Sequential) (None, 8, 8, 256) 3284736 _________________________________________________________________ sequential_6 (Sequential) (None, 4, 4, 512) 13123072 _________________________________________________________________ global_average_pooling2d (Gl multiple 0 _________________________________________________________________ dense (Dense) multiple 51300 ================================================================= Total params: 17,507,428 Trainable params: 17,495,780 Non-trainable params: 11,648 _________________________________________________________________
处理数据
和VGG几乎一致。需要特别注意的是,添加了这段代码。
1 2 3 4 5 x_train = x_train[:10000 ] y_train = y_train[:10000 ] x_test = x_test[:2000 ] y_test = y_test[:2000 ]
训练网络
示例代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 epochs = 1 for epoch in range(epochs): for step, (x, y) in enumerate(db_train): with tf.GradientTape() as tape: logits = model(x) y_onehot = tf.one_hot(y, depth=100 ) loss = tf.losses.categorical_crossentropy(y_onehot, logits, from_logits=True ) loss = tf.reduce_mean(loss) grads = tape.gradient(loss, model.trainable_variables) optimizer.apply_gradients(zip(grads, model.trainable_variables)) if step % 10 == 0 : print(epoch, step, 'loss: ' , loss.numpy())
运行结果:
1 2 3 4 5 0 0 loss: 4.6136904 0 10 loss: 4.5993 0 20 loss: 4.559182 0 30 loss: 4.436839 0 40 loss: 4.4675236
测试网络
示例代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 total_num = 0 total_correct = 0 for x, y in db_test: logits = model(x) prob = tf.nn.softmax(logits, axis=1 ) pred = tf.argmax(prob, axis=1 ) pred = tf.cast(pred, tf.int32) correct = tf.cast(tf.equal(pred, y), dtype=tf.int32) correct = tf.reduce_sum(correct) total_num = total_num + x.shape[0 ] total_correct = total_correct + correct.numpy() print(total_num) print(total_correct) acc = total_correct / total_num print(acc)
运行结果:
因为我们减少了训练数据的数量,而且epochs设定为1,所以效果有限。但是我们看到准确率是0.0235,大于0.01。说明是具有一定效果的。
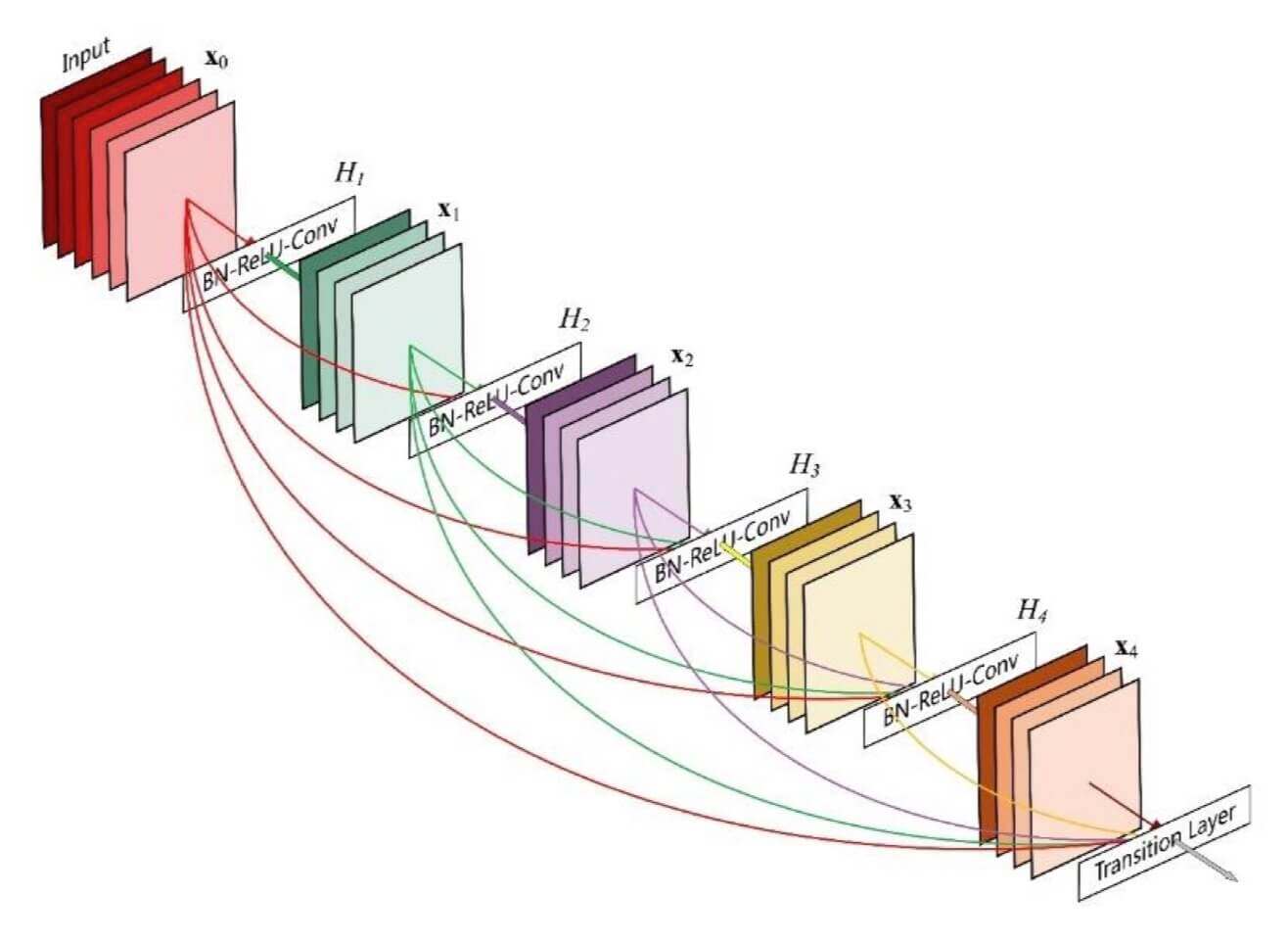
DenseNet
dense的意思是稠密的,浓厚的。ResBlock是由多个BasicBlock堆叠而成,如果这些BasicBlock不但进行堆叠,还进行了稠密连接,那么这个就是DenseBlock,如图:DenseBlock堆叠而成的就是DenseNet,如图: