过拟合
什么是过拟合
我们之前讨论的梯度下降也好,反向传播也好,都是在做一件事情,使损失函数的值最小。我们的损失函数用来表示模型对训练集的拟合效果,损失函数的值越小,拟合效果越好。现在,我们用一个过于复杂的模型去拟合训练集,这个模型能拟合所有的训练集,损失函数的值为0 0 0
在训练集上表现很好的模型,在测试集中也会表现很好。这是基于一个假设,训练集和测试集是独立同分布的。这点没有问题,在一定的应用场景下,假设成立。
但是,会有噪音啊,上帝可能会掷骰子,我们可能会把上帝掷的骰子也学进去。
过于复杂的模型,在训练集上表现非常好,但在测试集上表现不如人意。这种现象就是过拟合。
模型的容量
在过拟合的定义中,我们提到了一词:“过于复杂的模型”。
我们举例子,假设现在有这么几个模型。
模型一:y = k 1 x 1 + b y = k_1x_1 + b y = k 1 x 1 + b
模型二:y = k 2 x 2 2 + k 1 x 1 + b y = k_2x_2^2 + k_1x_1 + b y = k 2 x 2 2 + k 1 x 1 + b
模型三:y = k 3 x 3 3 + k 2 x 2 2 + k 1 x 1 + b y = k_3x_3^3 + k_2x_2^2 + k_1x_1 + b y = k 3 x 3 3 + k 2 x 2 2 + k 1 x 1 + b
对于模型一:当k 1 = 0 k_1 = 0 k 1 = 0 k 1 ≠ 0 k_1 \neq 0 k 1 = 0 [一次多项式、常数]。k 2 = 0 k_2 = 0 k 2 = 0 k 1 ≠ 0 k_1 \neq 0 k 1 = 0 [二次多项式、一次多项式、常数]。[三次多项式、二次多项式、一次多项式、常数],是三个模型中容量最大的那个。只要模型一和模型二能够表达的,模型三都能表达。这样看起来,模型三是万能的。似乎我们可以直接选择容量最大的模型。但是,模型容量越大,需要消耗的计算资源越多。而且,假设空间越大,越容易学习到噪音,产生过拟合现象。
泛化能力
现在我们已经知道什么是"过于复杂的模型","在训练集上表现非常好,但在测试集上表现不如人意。"这个也有个专门的名词:泛化能力 。
那么如何去选择合适的模型容量,取得较好的泛化能力呢?
有一种方法是VC维度,这是统计学习理论中的内容,实际中很少用。很少用的原因不是说不合理,这个方法是有理论保证的。很少用的原因很难用,毕竟有些神经网络模型非常复杂。
第二种方法是"如无必要,勿增实体",例如,如果通过两层的神经网络结构可以很好的表达,那么就不要用三层的。这个也被称为奥卡姆剃刀原理,出自《箴言书注》。那么,什么是《箴言》呢?《圣经》。
还有一个和"泛化能力"比较接近的名词,叫做"鲁棒性",这个在一个户外群中,有过讨论。
比如说汽车司机,汽车司机在身体不适的情况下,依旧能很好的开车,就是鲁棒性强。然后汽车司机除了能开汽车,还能开飞机坦克就是说泛化能力强。 然后以户外装备来说,如果户外装备在有一定的损耗下,还很好用,就是鲁棒性强。如果这个装备除了能在雪地里用,还能在沙漠甚至水下用,就是泛化能力强。
交叉验证
接下来,我们讨论办法。
关于交叉验证,我们在《经典机器学习及其Python实现:7.交叉验证和网格搜索》 中也有过讨论。当时,我们把数据分为了两部分,训练集和测试集。现在我们对训练集再进行划分。划分为训练集和验证集,通过新的训练集和验证集,我们也可以得到一个准确率。
例如:把数据分成4等份,这个也被成为4折交叉验证。
第一份
第二份
第三份
第四份
结果
验证集 训练集
训练集
训练集
当前情况下,模型的准确率
训练集
验证集 训练集
训练集
当前情况下,模型的准确率
训练集
训练集
验证集 训练集
当前情况下,模型的准确率
训练集
训练集
训练集
验证集 当前情况下,模型的准确率
在每一种的训练集和验证集下,我们都可以一个得到模型的准确率,对准确率求平均。通过这种方法让模型的评估结果更加准确可信。
这种方法的思路其实是,在训练集上表现非常好,但在测试集上表现不如人意。不一定就是过拟合,也可能是"模型真的有问题",在训练集上表现非常好只是运气好而已。而通过交叉验证,就是检查模型是真的过拟合了,还是"模型真的有问题"。就像在高考前的模拟成绩非常好,但是高考成绩不如意。可能就是水平不行,除非高考前足够多次的模拟成绩都很好,那么就要找找原因了。
过拟合:模型过于复杂
欠拟合:模型过于简单
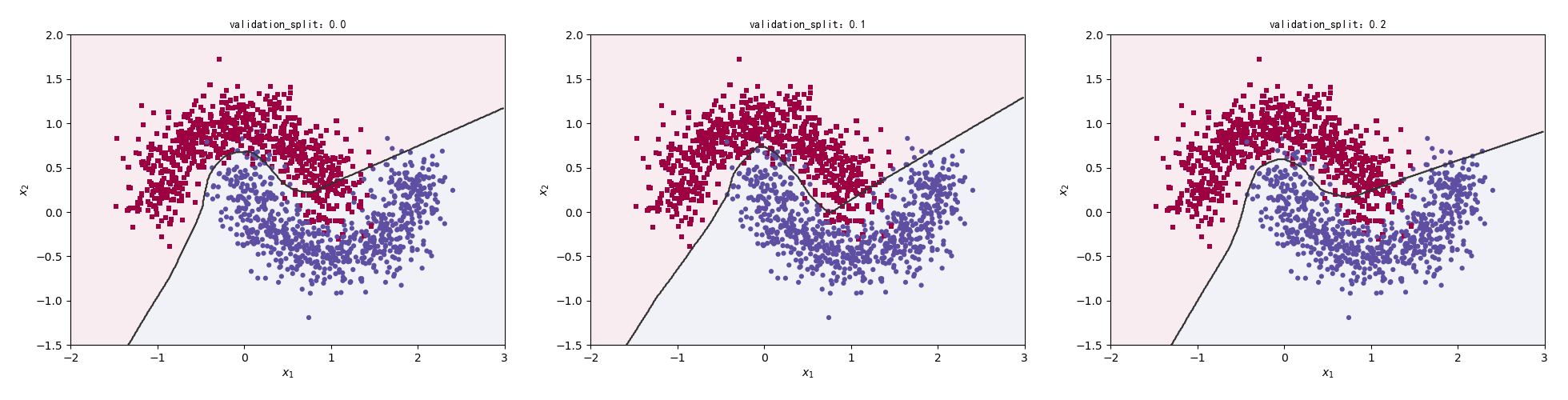
在TensorFlow要实现交叉验证,非常简单。用model.fit()中的validation_split参数进行控制即可。
1 model.fit(x_train, y_train, epochs=5,validation_split=validation_split, verbose=1)
接下来我们比较在没有交叉验证和交叉验证比例为0.1、0.2时的分类效果。
示例代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 for n in range(3 ): validation_split = n * 0.1 model = Sequential() model.add(layers.Dense(16 , input_dim=2 , activation='relu' )) model.add(layers.Dense(64 , activation='relu' )) model.add(layers.Dense(128 , activation='relu' )) model.add(layers.Dense(16 , activation='relu' )) model.add(layers.Dense(1 , activation='sigmoid' )) model.compile(loss='binary_crossentropy' , optimizer='adam' , metrics=['accuracy' ]) model.fit(x_train, y_train, epochs=5 ,validation_split=validation_split, verbose=1 ) preds = model.predict_classes(np.c_[XX.ravel(), YY.ravel()]) title = "validation_split:{0}" .format(validation_split) make_plot(x_train, y_train, title, XX, YY, preds)
运行结果:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 Epoch 1/5 47/47 [==============================] - 0s 1ms/step - loss: 0.4773 - accuracy: 0.8220 Epoch 2/5 47/47 [==============================] - 0s 1ms/step - loss: 0.3035 - accuracy: 0.8547 Epoch 3/5 47/47 [==============================] - 0s 979us/step - loss: 0.2711 - accuracy: 0.8867 Epoch 4/5 47/47 [==============================] - 0s 915us/step - loss: 0.2322 - accuracy: 0.9040 Epoch 5/5 47/47 [==============================] - 0s 1ms/step - loss: 0.1953 - accuracy: 0.9227 【部分运行结果略】 Epoch 1/5 38/38 [==============================] - 0s 8ms/step - loss: 0.5479 - accuracy: 0.8000 - val_loss: 0.3755 - val_accuracy: 0.8767 Epoch 2/5 38/38 [==============================] - 0s 1ms/step - loss: 0.3366 - accuracy: 0.8525 - val_loss: 0.2758 - val_accuracy: 0.8933 Epoch 3/5 38/38 [==============================] - 0s 2ms/step - loss: 0.2928 - accuracy: 0.8750 - val_loss: 0.2519 - val_accuracy: 0.8767 Epoch 4/5 38/38 [==============================] - 0s 1ms/step - loss: 0.2520 - accuracy: 0.9017 - val_loss: 0.1991 - val_accuracy: 0.9333 Epoch 5/5 38/38 [==============================] - 0s 2ms/step - loss: 0.2121 - accuracy: 0.9183 - val_loss: 0.1613 - val_accuracy: 0.9433
重新设计模型
通过交叉验证,我们检查模型是不是真的过拟合。那么,如果真的是过拟合了,怎么办?重新设计模型。
我们用model.add()方法来添加网络层。
1 model.add(layers.Dense(128, activation='relu'))
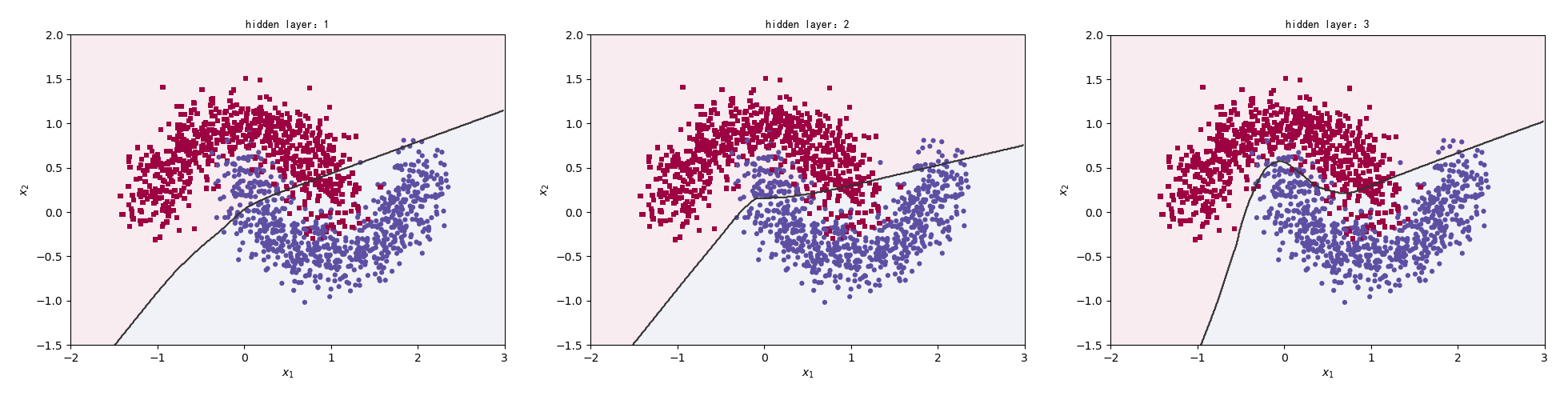
我们把隐藏层定为layers.Dense(64, activation='relu')。分别比较一层隐藏层、二层隐藏层、三层隐藏层的情况。
示例代码:
1 2 3 4 5 6 7 8 9 10 11 for n in range(3 ): model = Sequential() model.add(layers.Dense(64 , input_dim=2 , activation='relu' )) for i in range(n): model.add(layers.Dense(64 , activation='relu' )) model.add(layers.Dense(1 , activation='sigmoid' )) model.compile(loss='binary_crossentropy' , optimizer='adam' , metrics=['accuracy' ]) model.fit(x_train, y_train, epochs=5 , verbose=1 ) preds = model.predict_classes(np.c_[XX.ravel(), YY.ravel()]) title = "hidden layer:{0}" .format(n+1 ) make_plot(x_train, y_train, title, XX, YY, preds)
运行结果:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 Epoch 1/5 47/47 [==============================] - 0s 1000us/step - loss: 0.6139 - accuracy: 0.7373 Epoch 2/5 47/47 [==============================] - 0s 1ms/step - loss: 0.4670 - accuracy: 0.8400 Epoch 3/5 47/47 [==============================] - 0s 766us/step - loss: 0.3926 - accuracy: 0.8407 Epoch 4/5 47/47 [==============================] - 0s 723us/step - loss: 0.3518 - accuracy: 0.8520 Epoch 5/5 47/47 [==============================] - 0s 745us/step - loss: 0.3281 - accuracy: 0.8620 【部分运行结果略】 Epoch 1/5 47/47 [==============================] - 0s 936us/step - loss: 0.4731 - accuracy: 0.8240 Epoch 2/5 47/47 [==============================] - 0s 979us/step - loss: 0.2935 - accuracy: 0.8627 Epoch 3/5 47/47 [==============================] - 0s 936us/step - loss: 0.2630 - accuracy: 0.8720 Epoch 4/5 47/47 [==============================] - 0s 936us/step - loss: 0.2347 - accuracy: 0.8933 Epoch 5/5 47/47 [==============================] - 0s 1ms/step - loss: 0.2045 - accuracy: 0.9140
当然重新设计模型不仅仅是说网络层数的减少。重新设计,甚至可以完全推倒重来。
关于不同层数以及每层不同节点对同一个问题的影响,谷歌有很方便的工具,可以带给我们很直观的理解。
https://playground.tensorflow.org
提前停止
在上一小节中,我们人为的选用更简单的模型。现在我们通过程序来控制,让模型不至于太复杂。
我们把对训练集中的一个Batch运算更新一次叫做一个Step,对训练集的所有样本循环迭代一次叫做一个Epoch。在数次Step或数次Epoch后使用,用验证集进行验证。验证越频繁,越能够精准地观测模型的训练状况。但是也会增加计算的代价,一般建议在几个Epoch后进行一次验证运算。如果一定的次数后,验证性能没有提升,我们就提前停止。
伪代码:
带 Early stopping 功能的功能的网络训练网络训练算法
随机初始化参数θ \theta θ repeat for step = 1,2,…,N do ( x , y ) ∼ D t r a i n {(\bold{x},y)}\sim\boldsymbol{D}^{train} ( x , y ) ∼ D t r a i n θ ← θ − η ∇ θ L ( f ( x ) , y ) \theta \leftarrow \theta - \eta\nabla_\theta L(f(\bold{x}),y) θ ← θ − η ∇ θ L ( f ( x ) , y ) end
if 是每第n个 Epoch do ( x , y ) ∼ D t r a i n {(\bold{x},y)}\sim\boldsymbol{D}^{train} ( x , y ) ∼ D t r a i n if 验证性能连续数次不提升 do end end until 训练达到最大回合数 Epoch( x , y ) ∼ D t r a i n {(\bold{x},y)}\sim\boldsymbol{D}^{train} ( x , y ) ∼ D t r a i n 输出 :网络参数θ \theta θ
在TensorFlow中,我们不用手动去写上面的逻辑,有很方便的工具。
1 2 3 4 5 early_stopping=tf.keras.callbacks.EarlyStopping(monitor='val_loss', min_delta=0, patience=0, verbose=0, mode='auto', baseline=None, restore_best_weights=False) model.fit(callbacks = [early_stopping])
参数介绍:
monitor:被监测的数据。min_delta:在被监测的数据中被认为是提升的最小变化, 例如,小于min_delta的绝对变化会被认为没有提升。patience:没有进步的训练轮数,在这之后训练就会被停止。verbose:详细信息模式。mode:{auto,min,max} 其中之一。 在min模式中, 当被监测的数据停止下降,训练就会停止;在max模式中,当被监测的数据停止上升,训练就会停止;在 auto 模式中,方向会自动从被监测的数据的名字中判断出来。baseline:要监控的数量的基准值。 如果模型没有显示基准的改善,训练将停止。restore_best_weights:是否从具有监测数量的最佳值的时期恢复模型权重。 如果为False,则使用在训练的最后一步获得的模型权重。
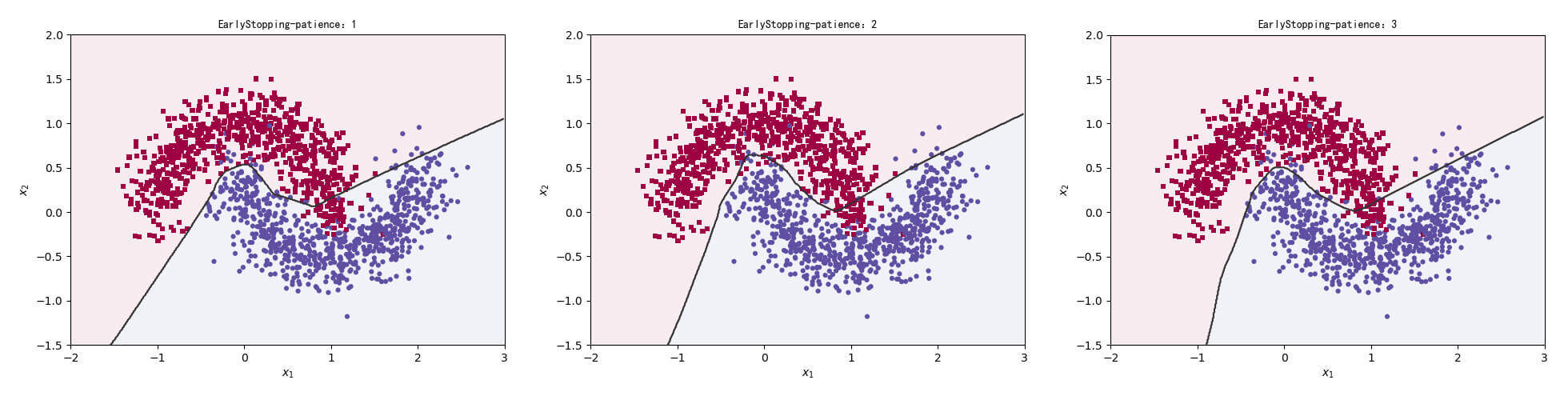
我们比较patience分别为1、2、3时的结果。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 for n in range(3 ): patience = n + 1 early_stopping = EarlyStopping(monitor='loss' , min_delta=0 , patience=patience, verbose=0 , mode='auto' , baseline=None , restore_best_weights=False ) model = Sequential() model.add(layers.Dense(16 , input_dim=2 , activation='relu' )) model.add(layers.Dense(64 , activation='relu' )) model.add(layers.Dense(128 , activation='relu' )) model.add(layers.Dense(16 , activation='relu' )) model.add(layers.Dense(1 , activation='sigmoid' )) model.compile(loss='binary_crossentropy' , optimizer='adam' , metrics=['accuracy' ]) model.fit(x_train, y_train, epochs=5 , verbose=1 , callbacks=[early_stopping]) preds = model.predict_classes(np.c_[XX.ravel(), YY.ravel()]) title = "EarlyStopping-patience:{0}" .format(patience) make_plot(x_train, y_train, title, XX, YY, preds)
运行结果:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 Epoch 1/5 47/47 [==============================] - 0s 1ms/step - loss: 0.4638 - accuracy: 0.8373 Epoch 2/5 47/47 [==============================] - 0s 1ms/step - loss: 0.2753 - accuracy: 0.8747 Epoch 3/5 47/47 [==============================] - 0s 979us/step - loss: 0.2378 - accuracy: 0.8987 Epoch 4/5 47/47 [==============================] - 0s 1ms/step - loss: 0.2053 - accuracy: 0.9147 Epoch 5/5 47/47 [==============================] - 0s 1ms/step - loss: 0.1690 - accuracy: 0.9327 【部分运行结果略】 Epoch 1/5 47/47 [==============================] - 0s 1ms/step - loss: 0.5083 - accuracy: 0.8220 Epoch 2/5 47/47 [==============================] - 0s 1ms/step - loss: 0.3121 - accuracy: 0.8693 Epoch 3/5 47/47 [==============================] - 0s 936us/step - loss: 0.2613 - accuracy: 0.8853 Epoch 4/5 47/47 [==============================] - 0s 915us/step - loss: 0.2178 - accuracy: 0.9153 Epoch 5/5 47/47 [==============================] - 0s 1ms/step - loss: 0.1642 - accuracy: 0.9387
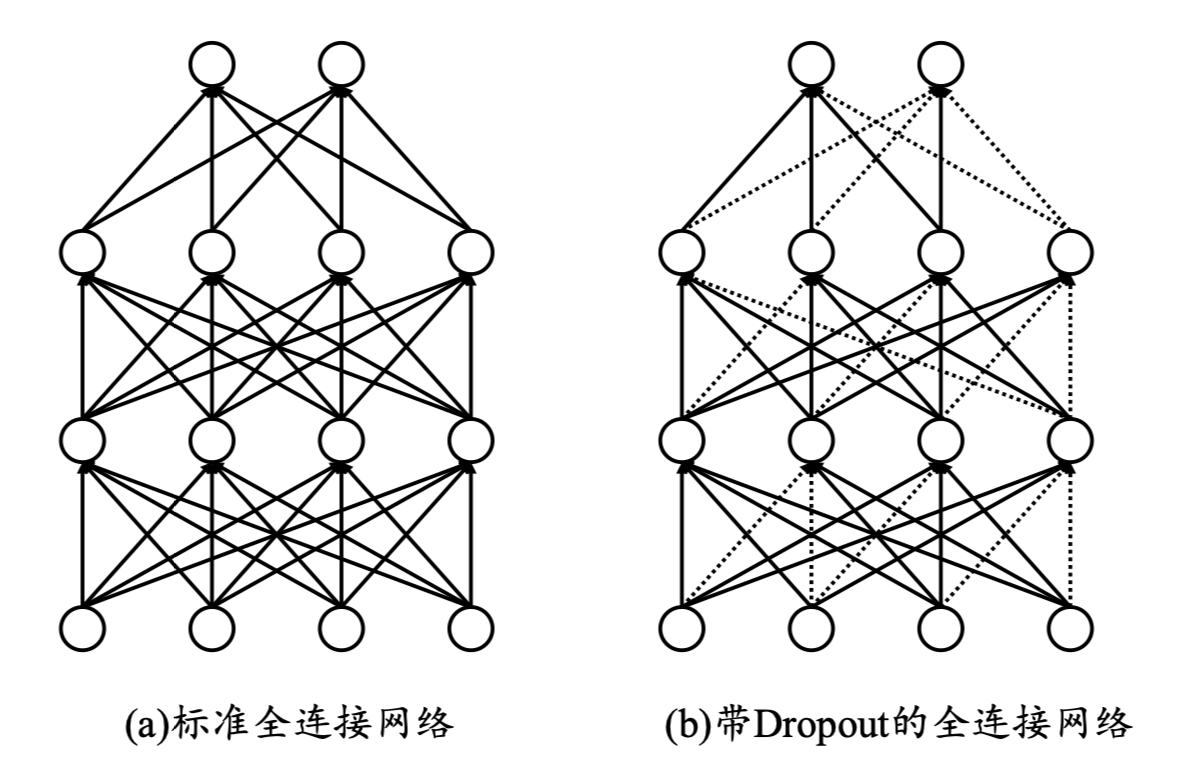
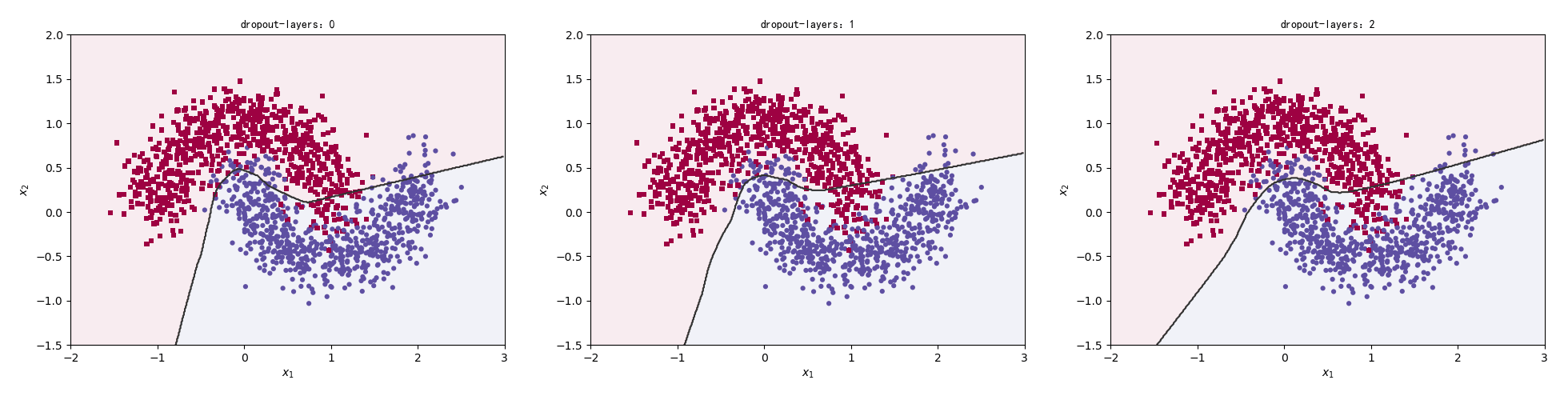
Dropout
Dropout通过随机断开神经网络的连接,减少每次训练时实际参与的参数量;需要注意的是,在测试的时候,Dropout会恢复所有的连接,保证模型测试时获得最好的性能。
在TensorFlow中,Dropout的方法是
除此之外,我们还可以在网络中插入一个Dropout层。
1 model.add(layers.Dropout())
我们分别比较不加Dropout,Dropout的数量为1和2的情况。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 for n in range(3 ): early_stopping = EarlyStopping(monitor='loss' , min_delta=0 , verbose=0 , mode='auto' , baseline=None , restore_best_weights=False ) model = Sequential() model.add(layers.Dense(16 , input_dim=2 , activation='relu' )) if n > 0 : model.add(layers.Dropout(rate=0.3 )) model.add(layers.Dense(64 , activation='relu' )) if n > 1 : model.add(layers.Dropout(rate=0.3 )) model.add(layers.Dense(128 , activation='relu' )) model.add(layers.Dense(16 , activation='relu' )) model.add(layers.Dense(1 , activation='sigmoid' )) model.compile(loss='binary_crossentropy' , optimizer='adam' , metrics=['accuracy' ]) model.fit(x_train, y_train, epochs=5 , verbose=1 , callbacks=[early_stopping]) preds = model.predict_classes(np.c_[XX.ravel(), YY.ravel()]) title = "dropout-layers:{0}" .format(n) make_plot(x_train, y_train, title, XX, YY, preds)
运行结果:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 Epoch 1/5 47/47 [==============================] - 0s 1ms/step - loss: 0.5210 - accuracy: 0.7933 Epoch 2/5 47/47 [==============================] - 0s 1ms/step - loss: 0.3122 - accuracy: 0.8680 Epoch 3/5 47/47 [==============================] - 0s 979us/step - loss: 0.2571 - accuracy: 0.8927 Epoch 4/5 47/47 [==============================] - 0s 894us/step - loss: 0.2254 - accuracy: 0.9067 Epoch 5/5 47/47 [==============================] - 0s 1000us/step - loss: 0.1999 - accuracy: 0.9213 【部分运行结果略】 Epoch 1/5 47/47 [==============================] - 0s 1ms/step - loss: 0.5133 - accuracy: 0.8060 Epoch 2/5 47/47 [==============================] - 0s 1ms/step - loss: 0.3414 - accuracy: 0.8487 Epoch 3/5 47/47 [==============================] - 0s 1000us/step - loss: 0.3220 - accuracy: 0.8613 Epoch 4/5 47/47 [==============================] - 0s 1ms/step - loss: 0.2905 - accuracy: 0.8853 Epoch 5/5 47/47 [==============================] - 0s 1ms/step - loss: 0.2709 - accuracy: 0.8893
正则化
正则化,这个我们在《经典机器学习及其Python实现:12.Lasso回归和岭回归》 中也讨论过了。y = β 0 + β 1 x + β 2 x 2 + β 3 x 3 + ⋅ ⋅ ⋅ + β n x n y = \beta_0 + \beta_1x + \beta_2x^2 + \beta_3x^3 + ··· + \beta_nx^n y = β 0 + β 1 x + β 2 x 2 + β 3 x 3 + ⋅ ⋅ ⋅ + β n x n L ( f θ ( x , y ) ) L(f_\theta(\bold{x},y)) L ( f θ ( x , y ) ) θ \theta θ
L ( f θ ( x , y ) ) + λ ⋅ Ω ( θ ) L(f_\theta(\bold{x},y)) + \lambda \cdot \Omega(\theta)
L ( f θ ( x , y ) ) + λ ⋅ Ω ( θ )
Ω ( θ ) = ∑ ∣ ∣ θ i ∣ ∣ l \Omega(\theta) = \sum||\theta_i||_l
Ω ( θ ) = ∑ ∣ ∣ θ i ∣ ∣ l
其中
λ \lambda λ ∣ ∣ θ i ∣ ∣ l ||\theta_i||_l ∣ ∣ θ i ∣ ∣ l θ i \theta_i θ i l l l
常见的有
L 1 L1 L 1 Ω ( θ ) = ∑ ∣ ∣ θ i ∣ ∣ 1 \Omega(\theta) = \sum||\theta_i||_1 Ω ( θ ) = ∑ ∣ ∣ θ i ∣ ∣ 1 θ i \theta_i θ i L 2 L2 L 2 Ω ( θ ) = ∑ ∣ ∣ θ i ∣ ∣ 2 \Omega(\theta) = \sum||\theta_i||_2 Ω ( θ ) = ∑ ∣ ∣ θ i ∣ ∣ 2 θ i \theta_i θ i
还有一种正则化,L 0 L0 L 0 Ω ( θ ) = ∑ ∣ ∣ θ i ∣ ∣ 0 \Omega(\theta) = \sum||\theta_i||_0 Ω ( θ ) = ∑ ∣ ∣ θ i ∣ ∣ 0 θ i \theta_i θ i
在TensorFlow中实现正则化的方法是:
1 2 3 4 5 6 # L1 Regularization Penalty tf.keras.regularizers.L1(0.3) # L2 Regularization Penalty tf.keras.regularizers.L2(0.1) # L1 + L2 penalties tf.keras.regularizers.L1L2(l1=0.01, l2=0.01)
1 2 3 4 5 layer = tf.keras.layers.Dense( 5, input_dim=5, kernel_initializer='ones', kernel_regularizer=tf.keras.regularizers.L1(0.01), activity_regularizer=tf.keras.regularizers.L2(0.01))
动量
动量是物理学中的一个概念。记的在高中物理中学过这个的,现在倒是忘得一干二净了。深度学习中的动量或许和高中物理中的动量有点关系,但这不是我们讨论的重点,毕竟以我现在的物理水平,是讨论不来的。
我们直接讨论深度学习中的动量。
w k + 1 = w k − l r ∗ f ′ ( w k ) \bold{w}^{k+1} = \bold{w}^{k} - lr * f'(\bold{w}^k)
w k + 1 = w k − l r ∗ f ′ ( w k )
现在,我们改一下梯度下降的规则。
z k + 1 = β z k + f ′ ( w k ) \bold{z}^{k+1} = \beta\bold{z}^{k} + f'(\bold{w}^k)
z k + 1 = β z k + f ′ ( w k )
w k + 1 = w k − l r ∗ z k + 1 \bold{w}^{k+1} = \bold{w}^{k} - lr * \bold{z}^{k+1}
w k + 1 = w k − l r ∗ z k + 1
即改变了梯度的方向,避免"急转弯"。
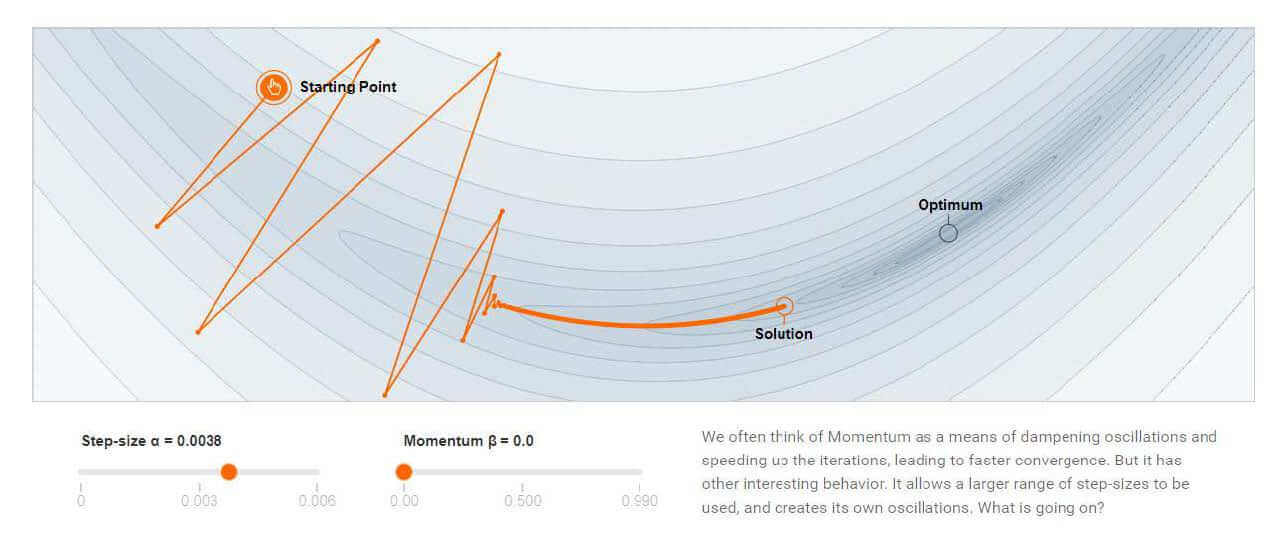
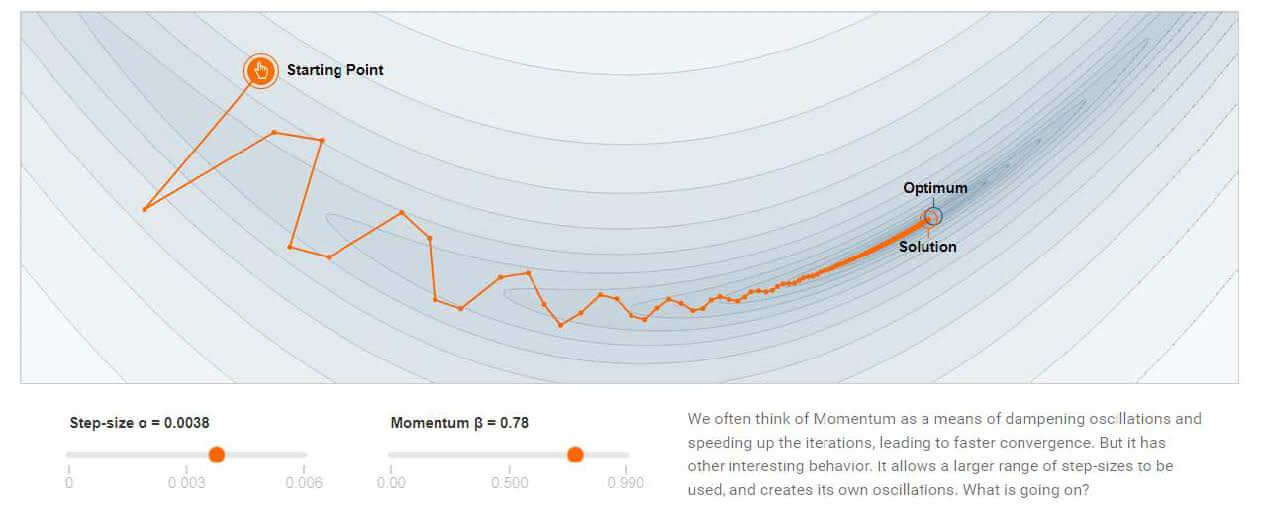
下图分别是没有动量和有动量情况下的梯度下降。
没有动量:
有动量:
在TensorFlow中,我们可以非常方便的实现,设置momentum参数即可。
1 optimizers.SGD(learning_rate=0.02,momentum=0.9)
1 optimizers.RMSprop(learning_rate=0.01,momentum=0.02)
不过,需要注意的是,不是所有的优化方法都有momentum这个参数。比如:optimizers.Adam()。
学习率衰减
正如我们之前讨论的,学习率不能太大,否则效果太差。当然学习率也不能太小,否则优化的太慢。现在我们有一个折衷的办法,先快后慢。学习效率从大到小,逐步衰减。
和动量不同的是,学习率衰减的实现不是直接配置参数即可,但是也非常方便。
1 2 3 4 5 6 7 8 9 optimizer = optimizers.SGD(learning_rate=0.2) for epoch in range(100): # 部分代码略 optimizer.learning_rate = 0.2 * (100-epoch)/100 # 部分代码略
数据增强
现在我们换一个思路。没有困难,创造困难也要上。
旋转方法:
示例代码:
1 2 3 4 5 6 7 8 import tensorflow as tfimport matplotlib.pyplot as pltx = tf.io.read_file('img.jpg' ) x = tf.image.decode_jpeg(x,channels=3 ) x = tf.image.rot90(x) plt.imshow(x) plt.show()
运行结果:
除了旋转,还有很多方法。
翻转方法:
1 2 # 随机水平翻转 x = tf.image.random_flip_left_right(x)
1 2 # 随机竖直翻转 x = tf.image.random_flip_up_down(x)
缩放方法:
1 2 # 图像缩放 x = tf.image.resize(x, [244, 244])
裁剪方法:
1 2 # 随机裁剪 x = tf.image.random_crop(x, [200,200,3])
还有更多的方法,如:
亮度调整
对比度调整
色彩饱和度调整
图像标准化:将图像的像素调整为均值为0,方差为1。
这里不一一举例。
还要一个,我们还可以用生成对抗网络来生成数据。